Fundamentals of Robotics: Introduction
This is the first post of the series of Fundamentals of Robotics course that provides an introduction to the course and some introductory remarks on Robotics.
The course will cover all the fundamentals of robotics, including kinematics, mechanics, planning, and control.
This course is needed because, in most robotics classes, only part of the fundamentals are covered, and advanced topics such as planning and control are usually neglected.
To learn robotics efficiently, all of these topics should be covered in tandem, and neglecting each part will hinder learning.
We will use free robot simulators to implement most of the methods discussed. Both robot arms and mobile robots will be covered in this course.
The textbooks used for making these series are:
- Modern Robotics: Mechanics, Planning, and Control by Frank Park and Kevin Lynch
And
- A Mathematical Introduction to Robotic Manipulation by Murray, Lee, and Sastry
The second book is more advanced and is usually used for graduate-level robotics courses, but we will try our best to make the concepts as easy for you as possible.
In this course, a modern approach to Robotics will be followed, and by this, we mean that, for instance, Screw Theory will be used for kinematics instead of methods like Denavit Hartenberg. The modern approach has many advantages over conventional methods, and that’s why we chose to use it.
A robot consists of links and joints. Every joint connects exactly two links. Actuators, which can be, for instance, electric motors, will provide forces and torques and cause the links to move.
Ideally, the actuators are of lower speed and high torque, but available actuators have speeds in the range of thousands of RPMs, and speed reduction and torque amplification using gears are required.
Different sensors can also be equipped on the robot. For instance, to measure the position of the joints, encoders are installed on the joints. Tachometers can be used to measure velocity, and force/torque sensors are needed when a robot is exerting force on the environment, such as the task of writing on the board with chalk. Vision sensors such as cameras are also ubiquitous to localize objects in the environment of the robots.
An end-effector, gripper, or hand will be mounted on the last link to grasp and manipulate objects.
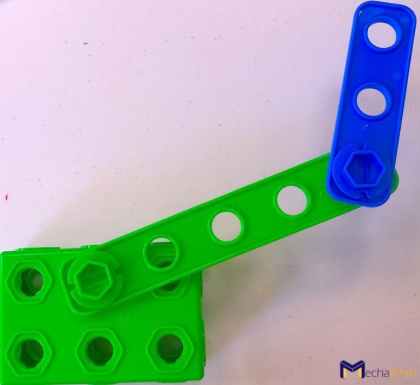
Robots can be open-chain AKA serial, or closed-chain with closed loops. When we stand with both our feet on the ground, we form a closed-chain, and our arm, when is allowed to move freely in space, is an example of an open-chain mechanism. The figure below shows the four-bar-linkage, which is a closed chain mechanism.

In the next course, we will answer the question of where is the robot? By developing an understanding of the configuration of the robot.
You can also watch the whole introduction in the following video:
References:
Textbooks:
- Modern Robotics: Mechanics, Planning, and Control by Frank Park and Kevin Lynch
- A Mathematical Introduction to Robotic Manipulation by Murray, Lee, and Sastry
Videos: