Robot Grasping in a Heavily Cluttered Environment
Korea Advanced Institute of Science and Technology (KAIST) student Dongwon Son has recently published interesting research about reactive grasping in a heavily cluttered environment in IEEE Robotics and Automation Letters.

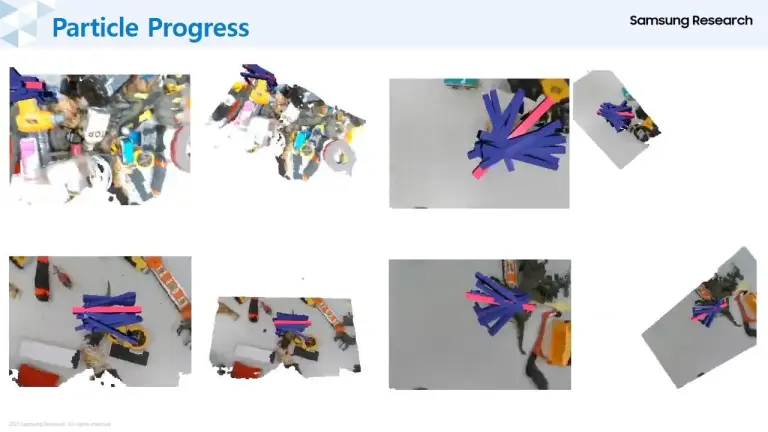
This study proposed a closed-loop framework for predicting the six-degree-of-freedom (dof) grasp in a heavily cluttered environment using vision observations.
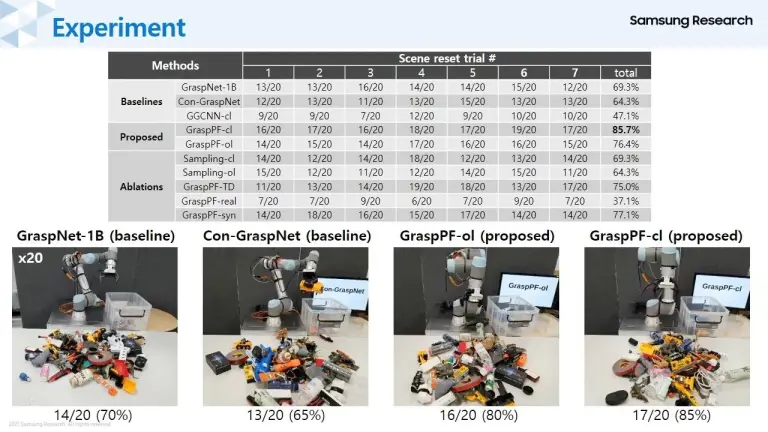
Experimental results on a robot in an environment with a lot of clutter showed that the grasping success rate had improved quantitatively compared to the previous algorithms. Additionally, the framework is able to respond qualitatively to a dynamic change in the environment and clean up the table successfully.
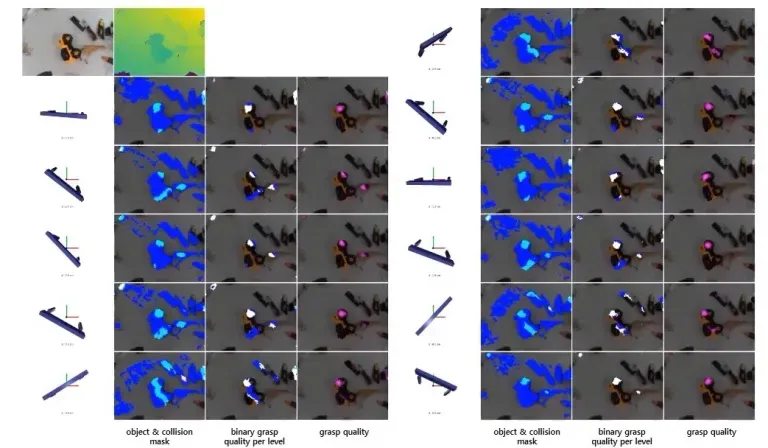
Their method involves formulating the grasping problem as a Hidden Markov Model and applying a particle filter in order to infer grasp. To make the particle filter process possible, they developed a lightweight Convolutional Neural Network (CNN) model for Real-time evaluation and initialization of grasp samples.