This wheel unicycle balancing robot can jump onto its wheels from any initial position
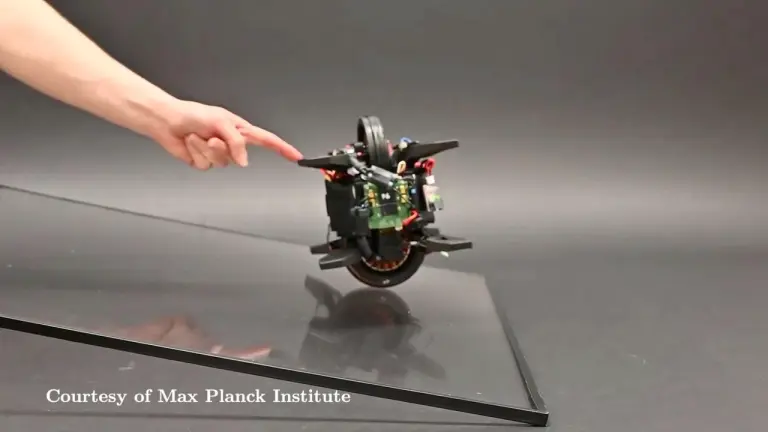
The Wheelbot is a wheel unicycle balancing robot developed by researchers at Max Planck Institute that jumps onto its wheels from any initial position.

The robot can self-erect itself from any position either by rolling up with its rolling wheel, or by standing up using its reaction wheel.
This wheel unicycle uses brushless motors with high torque-to-weight ratios. As a result, the Wheelbot has a better balance and can reject disturbances to a greater extent than previous reaction wheel unicycle robots.
These robots can be quite challenging to control and require nonlinear and data-driven control approaches since they have two coupled unstable degrees of freedom, nonholonomic, and underactuated dynamics.
Wheelbot is an open-source project, and anyone can download the files and codes to build their own robot.
References:
- “The Wheelbot: A jumping reaction wheel unicycle”
https://sites.google.com/view/wheelbot