Anthropomorphic mechanical design and Lyapunov-based control of a new shoulder rehabilitation system
Note: The Lyapunov-based control of the Rehabilitation Robot project was done during 2011 – 2013 when Madi was a Master’s student.

Stroke is one of the main causes of disability. It affects millions of people worldwide. One symptom of a stroke is disabled arm function. Restoration of arm function is necessary to resuming activities of daily living (ADL).
Along with traditional rehabilitation techniques, robot-aided therapy has emerged recently.
The control schemes of rehabilitation robots are designed for two reasons. First, they are designed for passive rehabilitation in which the robot guides the patient’s limb through a predefined path, and second for active rehabilitation in which the patient initiates the movement and is partially assisted or resisted by the robotic device.
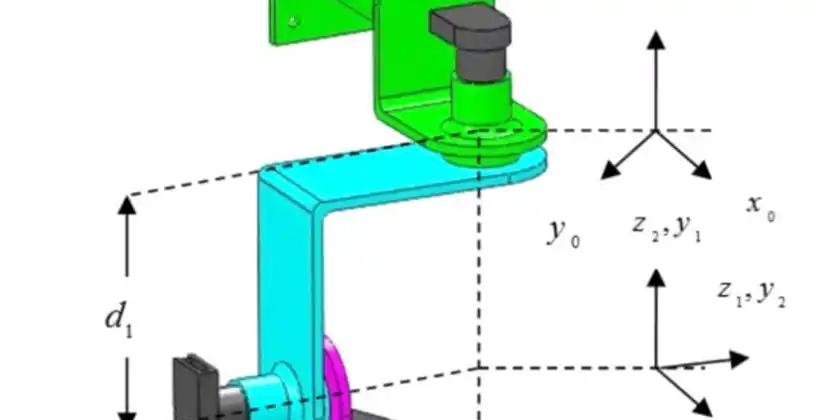
This paper introduces a new robot for shoulder rehabilitation. The Shoulder Rehabilitation System (SRS) has three degrees of freedom (DOFs) for three rotational DOFs of the shoulder but additional translational DOFs of the shoulder are also allowed to avoid discomfort to the patient.
A new open circular mechanism is proposed for the third joint that solves the known issues for rehabilitation robots such as long wiring and discomfort associated with closed mechanisms.
Lyapunov-based controller with integral action is proposed to guide the robot through a predefined trajectory. Simulation results proved that the proposed controller can track the desired trajectory; reject constant bounded disturbance to the system and is robust due to its nonlinear nature. The proposed controller is designed to be used in passive rehabilitation.
- To see the full article, Click HERE!
Here are the files to replicate the Lyapunov-based control of the Rehabilitation Robot project:
- The report of the Thesis: Click HERE!
- Design in SolidWorks: Click HERE!
- Shoulder Rehabilitation System (SRS) Dynamics: Click HERE!
- SRS with Inverse Dynamic Controller Tracking: Click HERE!
- SRS with Lyapunov Based Controller: Click HERE!
- SRS PD Control with Gravity Compensation Regulation: Click HERE!
- SRS PD Control with Gravity Compensation Tracking: Click HERE!
- SRS PID Control: Click HERE!