3D-Printed Grippers for Robots That Grip Almost Anything
University of Washington researchers developed a method for making 3D-printed grippers for robots that are capable of grabbing almost anything.
Their method involves an algorithm that can design a 3D-printable passive gripper based on the target object and its position and then calculates the best path to pick it up without collisions.

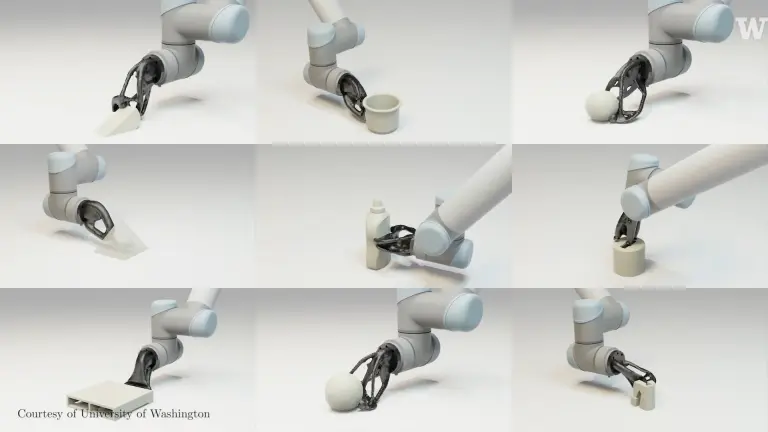
Tests were performed on 22 objects with challenging shapes, including a 3D-printed bunny, a wedge-shaped doorstop, a tennis ball, and a drill. Twenty of these 22 objects were gripped successfully, including two very challenging objects, the wedge and a pyramid-shaped object with a curved keyhole.

This research enables companies to make robot gripper switches as smooth as possible for carrying out different tasks with robots.
More information:
- https://dl.acm.org/doi/10.1145/3528223.3530162